 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某被控制对象的动态方程①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(
某被控制对象的动态方程
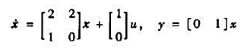
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某被控制对象的动态方程
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
如果结果不匹配,请 联系老师 获取答案
 更多“某被控制对象的动态方程①设计状态反馈向量k,使得经状态反馈u…”相关的问题
更多“某被控制对象的动态方程①设计状态反馈向量k,使得经状态反馈u…”相关的问题
已知系统的动态方程为:
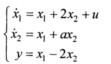 (1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
(1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
系统被控对象的传递函数为: 。
。
(1)用极点配置法设计状态反馈阵,使反馈系统成为阻尼比ζ=0.7,无阻尼自振角频率wn=5rad/s。
(2)画出反馈系统的状态变量图,并求出闭环系统的传递函数。
A.交流环节
B.反馈环节
C.前馈控制
D.评价环节
A.将原来m维状态向量动态规划问题分解为m个一维状态变量的子问题
B.通过状态廊道减小每次计算的规模
C.通过减少每次参与优化的阶段数来降低问题规模
D.通过迭代逼近问题的最优解

















