 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (1)写出对象的状态方程。 (2)若要求闭环系统的
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。
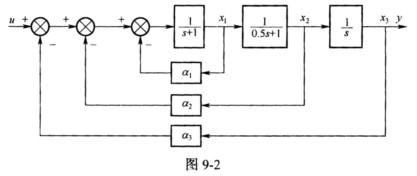 (1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
(1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
系统如图9-2所示,其中α1、α2、α3为状态反馈系数。
(1)写出对象的状态方程。 (2)若要求闭环系统的极点为-1、-2、-3、求α1、α2、α3。
如果结果不匹配,请 联系老师 获取答案
 更多“系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (…”相关的问题
更多“系统如图9-2所示,其中α1、α2、α3为状态反馈系数。 (…”相关的问题
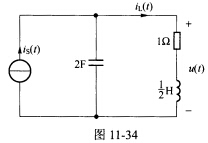
(南京航空航天大学2007年考研试题)电路如图11-34所示。(1)写出以u(t)和iL(t)为变量的状态方程;(2)求出网络函数
 ,并画出零、极点图:(3)求当is(t)=2ε(t)时的零状态响应。(注:ε(t)为单位阶跃函数)
,并画出零、极点图:(3)求当is(t)=2ε(t)时的零状态响应。(注:ε(t)为单位阶跃函数)
某连续时间实的因果LTI系统的零、极点如图4-69所示,并己知. 其中h(t)为该系统的单位冲激响应.试求:
其中h(t)为该系统的单位冲激响应.试求:
(1)它是什么类型的系统(全通或最小相移系统),并求h(t)(应为实函数);
(2)写出它的线性实系数微分方程表示;
(3)它的逆系统的单位冲激响应h1(t),该逆系统是可以实现的(即既因果又稳定)的吗?

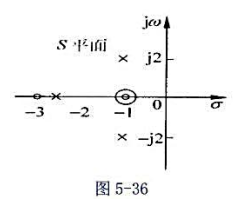
某连续时间实的因果LTI系统的零、极点如图5-36所示,并已知 ,其中h(t)为该系统的单位冲激响应。试求:
,其中h(t)为该系统的单位冲激响应。试求:
(1)它是什么类型的系统(全通或最小相移系统),并求h(t) (应为实函数);
(2)写出它的线性实系数微分方程表示;
(3)它的逆系统的单位冲激响应h1(t),该逆系统是可以实现的(即既因果又稳定)的吗?
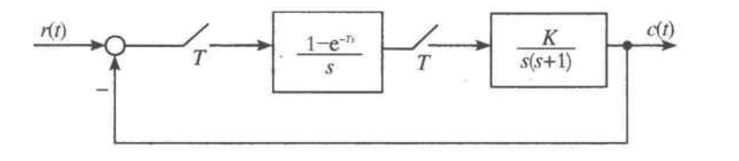
已知采样系统如图7-16所示,其中T=1s,K=1,
试求:
(1)闭环脉冲传递函数。
(2)判断系统是否稳定。
(3)写出描述系统教学模型的差分方程。
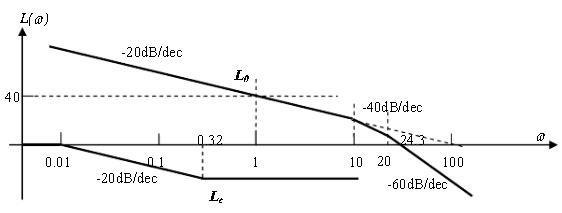
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
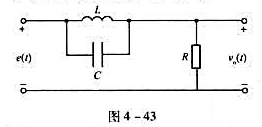
如图4-43所示电路:
(1)写出电压转移函数
(2)若激励信号 ,为使响应中不存在正弦稳态分量,求LC约束;
,为使响应中不存在正弦稳态分量,求LC约束;
(3)若 按第(2)问条件,求v0(t).
按第(2)问条件,求v0(t).
已知系统的动态方程为:
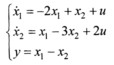 (1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
(1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
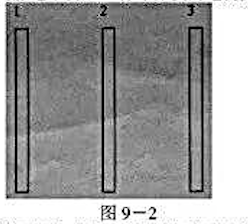
如图9-2所示,有3块平行放置的正方形大导体平板 1、2和3,每块板边长为L,相邻两板间距为d(d<0),将导体平板 1、2和3分别带电为q、2q和3q (q>0),求:
(1)各导体板的电荷分布。
(2)若将导体平板1和3接地,达到静电平衡后,各导体板的电荷分布。
在图3-13所示电路中,L1=L2=1H,R1=R2=R3=4Ω。

(1)写出电路的状态方程;
(2)如果电源电压为阶跃电压u=12ε(t)V,电路原处于零状态,试用复频域法解状态方程,并求出电流i1(t)和i2(t)。
某系统相平面如图8-46所示,试求从P1点到P2点所需要的时间,其中x1分别取为1、2、3和4。


















