如果结果不匹配,请
如果结果不匹配,请 
 更多“系统的开环增益是影响伺服系统的静态、动态指标的重要参数之一。…”相关的问题
更多“系统的开环增益是影响伺服系统的静态、动态指标的重要参数之一。…”相关的问题

第8题
(南京航空航天大学2005年硕士研究生入学考试试题)已知非最小相角系统的开环Bode图如图5-28所示,
(南京航空航天大学2005年硕士研究生入学考试试题)已知非最小相角系统的开环Bode图如图5-28所示,开环增益K>0。
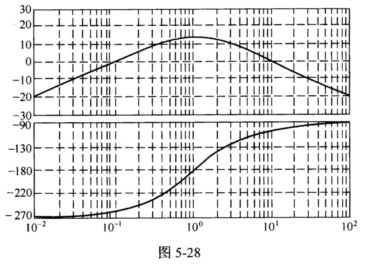 试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
第10题
某系统采用典型Ⅱ型系统结构设计,频域动态指标为:ωc=30s-1,Mp=1.5,求该系统的预期开环对数幅频特性、开环传递
某系统采用典型Ⅱ型系统结构设计,频域动态指标为:ωc=30s-1,Mp=1.5,求该系统的预期开环对数幅频特性、开环传递函数以及性能指标。如果时间常T2数不变,改取中频宽h=9,则开环对数幅频特性将如何变化?试求系统能达到的性能指标。
第11题
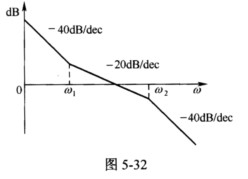
(武汉科技大学2004年硕士研究生入学考试试题)设有典型II型系统,其对数幅频特性如图5-32所示(ω1,ω
(武汉科技大学2004年硕士研究生入学考试试题)设有典型II型系统,其对数幅频特性如图5-32所示(ω1,ω2已知)。
 试求: (1)相位裕量γ最大时的幅值穿越频率ωc。 (2)当ω2/ω1=4时,求最大的相位裕量γ和系统开环增益K。
试求: (1)相位裕量γ最大时的幅值穿越频率ωc。 (2)当ω2/ω1=4时,求最大的相位裕量γ和系统开环增益K。