

 如果结果不匹配,请
如果结果不匹配,请 
 更多“在板料多次拉深时,拉深系数的取值应一次比一次大,即m1”相关的问题
更多“在板料多次拉深时,拉深系数的取值应一次比一次大,即m1”相关的问题
第2题
暴雨天气行车时,应降低车速,尽量避免通过积水路段.如果一定要通过积水处时,特别是较大积水路段时,如立交桥下、深槽隧道等,首先(),在保证安全的前提下,挂低挡,稳住油门,缓慢通过。
A.关闭电源总开关
B.停车观察水的实际深度
C.打开灯光总开关
D.停车观察轮胎的气压
第3题
如图所示,升降机以等加速作垂直直线运动,机内有盛油(ρg=8kN/m3)容器,油深0.5m底部有d=0.015m的一薄壁小孔,
如图所示,升降机以等加速

第4题
下列措施中,属于水下混凝土灌注质量控制点的有()。
A.灌注混凝土之前,对孔内进行二次清孔,控制孔底沉渣厚度
B.灌注使用的导管进行试拼接,并进行水密、承压和接头抗拉试验
C.控制水下混凝土的水胶比、坍落度
D.灌注过程中用测深锤探测孔内混凝土面位置,导管的埋深控制在2~6m
E.进行桩身完整性检测
第5题
下列关于普通螺栓群的说法中,错误的是()。
A.普通螺栓群轴心受拉时,按每颗螺栓平均受力考虑
B.普通螺栓群偏心受拉时,按受拉最大的那颗螺栓进行验算
C.普通螺栓群偏心受剪时,连接板按绝对刚性、螺栓按弹性体考虑
D.普通螺栓群轴心受剪时,不需要考虑长接头折减系数
第7题
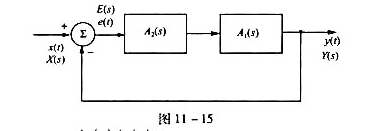
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
点击查看答案
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
第11题
如图所示,在水平桌面放一质量为mA的物体A,质量为mB的物体B放在A上,现用力FT拉物体A,使两者共同作加速运动,
如图所示,在水平桌面放一质量为mA的物体A,质量为mB的物体B放在A上,现用力FT拉物体A,使两者共同作加速运动,试分析各个力所做的正、负功.

















