

 如果结果不匹配,请
如果结果不匹配,请 
 更多“R(D)函数是关于D的下凸函数”相关的问题
更多“R(D)函数是关于D的下凸函数”相关的问题
A.如果R∈3NF,则R一定是BCNF
B.若R∈3NF,且不存在主属性对非码的函数依赖,则其是BCNF
C.如果R∈BCNF,则R∈3NF
D.以上说法都不对
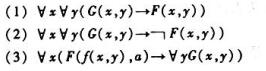
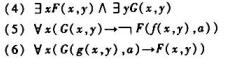
设解释I为:
(a)个体域为实数集R。
(b)R上特定元素
(c)R上特定函数
(d)R上特定谓词
I下的赋值σ:σ(x)=1,σ(y)=-1。
讨论下列各式在I和σ下的真值。
A.负梯度方向是使函数值下降最快的方向
B.当目标函数是凸函数时,梯度下降法的解是全局最优解
C.梯度下降法比牛顿法收敛速度快
D.拟牛顿法不需要计算Hesse矩阵
A.负梯度方向是使函数值下降最快的方向
B.当目标函数是凸函数时,梯度下降法的解是全局最优解
C.梯度下降法比牛顿法收敛速度快
D.拟牛顿法不需要计算Hesse矩阵
A.3模式中不存属性对侯选键的传递依赖
B.3模式不存在非主属性对侯选键的部分依赖
C.如果模式R是3,那么R一定是2
D.任何一个关系模式都可以既保持函数依赖又无损地分解为一系列3集
A.sphere(r)绘制的球体是由镶嵌三角形制成的空心球,r为球的半径。
B.球面分辨率函数sphereDetail()可控制球面网格的顶点数。
C.球面默认分辨率为 30,即球面一圈中每个顶点间隔360度/30 =12度。
D.sphereDetail(res)可设置球面每圈使用的段数或顶点数,要求res>=30。
A.在函数依赖A→B中,A称为决定因素
B.在关系R中,属性B依赖于属性A,则说明当属性A的值确定之后,属性B的值也就随之确定
C.函数依赖具有传递性
D.在关系R中,如果属性A依赖于属性B,这种依赖正式记作: A→B。
函数集合
V3={α=(a2x2+ax+a0)ex|a2,a1,a0∈R}
对于函数的线性运算构成3维线性空间,在V3中取一个基
α1=x2ex,α2=xex,α3=ex,
求微分运算D在这个基下的矩阵.
















