

 如果结果不匹配,请
如果结果不匹配,请 
 更多“在正逻辑约定下,“1”表示高()平,“0”表示()电平。”相关的问题
更多“在正逻辑约定下,“1”表示高()平,“0”表示()电平。”相关的问题
第4题
如图所示,灰色区域表示两台机器人的干涉区域。我们利用机器人的专用输出信号作业空间来进行互锁。希望机器人A在进入干涉区域前来检查机器人B是否在此干涉区域内。将干涉区域设定为机器人B的作业空间1,机器人B不在此区域内对机器人A输出信号。那么机器人B的作业空间要设定为()。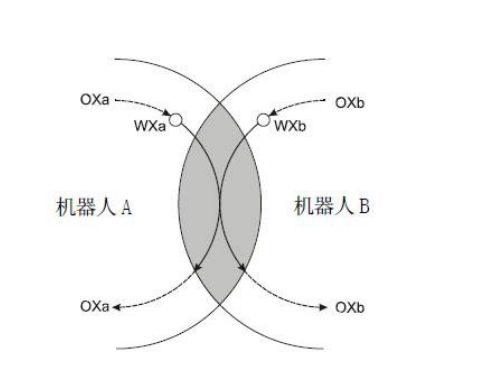
A.正逻辑
B.负逻辑
第5题
对于可逆反应H2 (g)+I2 (g)⇌2HI(g),在温度一定下由H2 (g)和I2 (g)开始反应,下列说法正确的是()
A.H2的消耗速率与HI的生成速率之比为2:1
B.若平衡正向移动,则V正一定增大
C.正、逆反应速率的比值是恒定的
D.达到平衡时,正、逆反应速率相等
第6题
以中规模电路为核心器件设计一个灯控逻辑电路,灯控逻辑如表所示,1表示“亮”,0表示“暗”。 CP 红灯
以中规模电路为核心器件设计一个灯控逻辑电路,灯控逻辑如表所示,1表示“亮”,0表示“暗”。
| CP | 红灯 | 黄灯 | 绿灯 |
| 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 |
| 4 | 0 | 1 | 0 |
| 5 | 1 | 0 | 0 |
| 6 | 1 | 1 | 1 |
第8题
基于课本上所示的PLA分别实现表(1)、(2)给出的2位-4线译码器电路。 表(1) 2位-4线译码(正逻辑输出)
基于课本上所示的PLA分别实现表(1)、(2)给出的2位-4线译码器电路。
| 表(1) 2位-4线译码(正逻辑输出) | |||||||
| S1 | bar{S_2} | A1 | A0 | Y0 | Y1 | Y2 | Y3 |
| 1 1 1 1 0 varphi | 0 0 0 0 varphi 1 | 0 0 1 1 varphi varphi | 0 1 0 1 varphi varphi | 1 0 0 0 0 0 | 0 1 0 0 0 0 | 0 0 1 0 0 0 | 0 0 0 1 0 0 |
| 表(2) 2位-4线译码(负逻辑输出) | |||||||
| S1 | bar{S_2} | A1 | A0 | bar{Y_0} | bar{Y_1} | bar{Y_2} | bar{Y_3} |
| 1 1 1 1 0 varphi | 0 0 0 0 varphi 1 | 0 0 1 1 varphi varphi | 0 1 0 1 varphi varphi | 0 1 1 1 1 1 | 1 0 1 1 1 1 | 1 1 0 1 1 1 | 1 1 1 0 1 1 |
















