
 如果结果不匹配,请
如果结果不匹配,请 
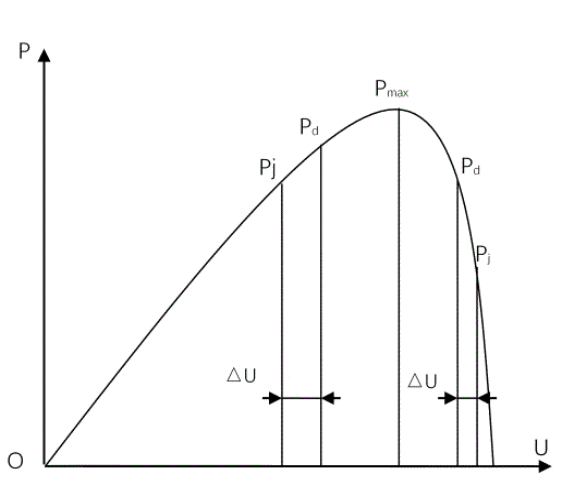
 更多“试分析大功率点跟踪控制(MPPT)的控制算法中扰动观察法的寻…”相关的问题
更多“试分析大功率点跟踪控制(MPPT)的控制算法中扰动观察法的寻…”相关的问题
第6题
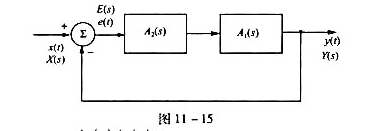
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
点击查看答案
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
第7题
店里今晚做消杀,做法错误的是()。
A.让消杀公司的人员单独去做消杀,不要打扰他工作
B.全程跟踪虫害人员的工作,了解虫害控制措施
C.与服务人员沟通,何处虫害迹象明显,要求重点控制
D.认真查阅消杀报告,并跟踪改善消杀报告中门店存在的风险点
第8题
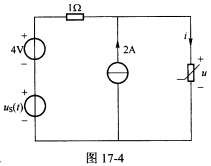
(西安交通大学2007年考研试题)图17-4所示的电路中,非线性电阻为电压控制型,用函数表示为,信号源u
(西安交通大学2007年考研试题)图17-4所示的电路中,非线性电阻为电压控制型,用函数表示为
 ,信号源us(t)=2×10-3cosωtV,试求在静态工作点处由小信号所产生的电压u(t)和电流i(t)。
,信号源us(t)=2×10-3cosωtV,试求在静态工作点处由小信号所产生的电压u(t)和电流i(t)。