

 如果结果不匹配,请
如果结果不匹配,请 
 更多“在典型I型系统中,当时间常数T已知时,随着放大系数K增大,系…”相关的问题
更多“在典型I型系统中,当时间常数T已知时,随着放大系数K增大,系…”相关的问题
第1题
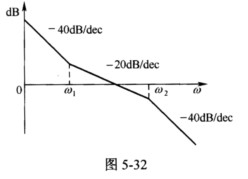
(武汉科技大学2004年硕士研究生入学考试试题)设有典型II型系统,其对数幅频特性如图5-32所示(ω1,ω
(武汉科技大学2004年硕士研究生入学考试试题)设有典型II型系统,其对数幅频特性如图5-32所示(ω1,ω2已知)。
 试求: (1)相位裕量γ最大时的幅值穿越频率ωc。 (2)当ω2/ω1=4时,求最大的相位裕量γ和系统开环增益K。
试求: (1)相位裕量γ最大时的幅值穿越频率ωc。 (2)当ω2/ω1=4时,求最大的相位裕量γ和系统开环增益K。
第2题
某LTI系统,在以下各种情况下起初始状态相同。已知当激励f1(t)=δ(t)时,其全响应;当激励时f
某LTI系统,在以下各种情况下起初始状态相同。已知当激励f1(t)=δ(t)时,其全响应;当激励时f
点击查看答案
某LTI系统,在以下各种情况下起初始状态相同。已知当激励f1(t)=δ(t)时,其全响应 ;当激励时f2(t)=ε(t),其全响应
;当激励时f2(t)=ε(t),其全响应 。
。
(1)若 ,求系统的全响应。
,求系统的全响应。
第4题
已知下列非齐次线性方程组(I),(II):(1)求方程组(I)的通解;(2)当方程组(II)的参效m,n,t为何值
已知下列非齐次线性方程组(I),(II):(1)求方程组(I)的通解;(2)当方程组(II)的参效m,n,t为何值
点击查看答案
已知下列非齐次线性方程组(I),(II):

(1)求方程组(I)的通解;
(2)当方程组(II)的参效m,n,t为何值时,方程组(I)和(II)同解。
第5题
已知可逆反应:在298.15K下进时的计算该可逆反应的标准平衡常数。在298.15K时,当反应系统中判断
已知可逆反应: 在298.15K下进时的
在298.15K下进时的 计算该可逆反应的标准平衡常数。在298.15K时,当反应系统中
计算该可逆反应的标准平衡常数。在298.15K时,当反应系统中 判断反应进行方向。
判断反应进行方向。

第7题
已知当输入信号为时,某连续时间因果LTI系统的输出信号为.试求:(1)该系统的单位冲激响应h(t),并
已知当输入信号为时,某连续时间因果LTI系统的输出信号为.试求:(1)该系统的单位冲激响应h(t),并
点击查看答案
已知当输入信号为 时,某连续时间因果LTI系统的输出信号为
时,某连续时间因果LTI系统的输出信号为 .试求:
.试求:
(1)该系统的单位冲激响应h(t),并画出h(t)的波形;
(2)当该系统输入为 时的输出信号y1(t),并画出y1(t)的波形.
时的输出信号y1(t),并画出y1(t)的波形.
第8题
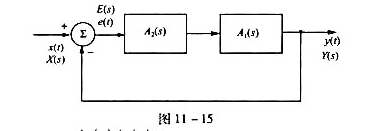
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
点击查看答案
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
第11题
用时间常数为0.5s的一阶测量系统进行测量。若要求对某信号测试的幅值误差不大于5%,试估计所测量信号的工作频带的上限频率。如果对该系统输入信号x(t)=sin(πt)+sin(4πt),试给出此系统的稳态输出。
















