

 如果结果不匹配,请
如果结果不匹配,请 
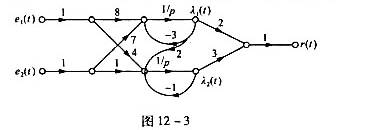
 更多“给定系统流图如图12-3所示,列写状态方程和输出方程.”相关的问题
更多“给定系统流图如图12-3所示,列写状态方程和输出方程.”相关的问题


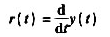
 的微分方程表示.
的微分方程表示.

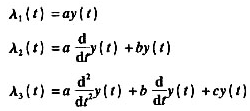
 列写状态方程和输出方程.
列写状态方程和输出方程.第7题
放大器的频率特性如图3.4.9所示,判断图(a)~(c)表示的系统哪个稳定,哪个不稳定。
放大器的频率特性如图3.4.9所示,判断图(a)~(c)表示的系统哪个稳定,哪个不稳定。

第8题
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。 (1)分别求系统A、系统B的u到y的传递
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。
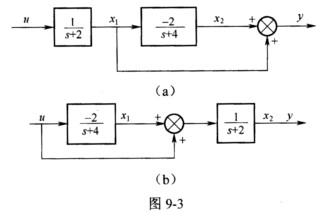 (1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
(1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
 ,
,
第10题
(武汉科技大学2004年硕士研究生入学考试试题)图5-31(a)所示的反馈控制系统,其中G1的极坐标图、G2
(武汉科技大学2004年硕士研究生入学考试试题)图5-31(a)所示的反馈控制系统,其中G1的极坐标图、G2的对数幅频特性分别如图5-31(b)、图5-31(c)所示。
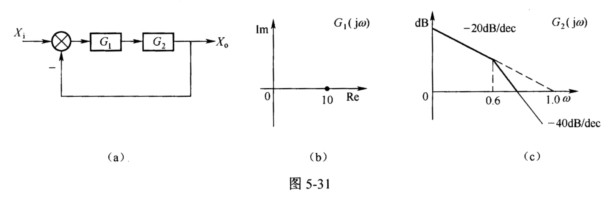 试求:闭环系统的阻尼比。
试求:闭环系统的阻尼比。
第11题
(南京航空航天大学2005年硕士研究生入学考试试题)已知非最小相角系统的开环Bode图如图5-28所示,
(南京航空航天大学2005年硕士研究生入学考试试题)已知非最小相角系统的开环Bode图如图5-28所示,开环增益K>0。
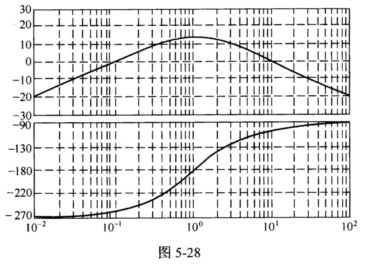 试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
试求: (1)确定开环传递函数G(s)。 (2)用奈氏判据确定使系统稳定的K值范围。
















