题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
试证:由a1=(0,1,1)T,a2=(1,0,1)T,a3=(1,1,0)T所生成的向量空间
试证:由a1=(0,1,1)T,a2=(1,0,1)T,a3=(1,1,0)T所生成的向量空间
就是R3。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
就是R3。
如果结果不匹配,请 联系老师 获取答案
 更多“试证:由a1=(0,1,1)T,a2=(1,0,1)T,a3…”相关的问题
更多“试证:由a1=(0,1,1)T,a2=(1,0,1)T,a3…”相关的问题
试证不等式
此处p1,p2,…,pn;a1,a2,…,an都是正数,而a1,a2,…,an不全相等.
设C为逐段光滑闭曲线,int(C)=G,函数f(z)在G内除极点a1,a2,…,an(均≠0)外解析,在
 =G∪C上除这些点外连续, 则
=G∪C上除这些点外连续, 则
 其中z≠0,且z∈G及z≠ak(k=1,2,…,n),Gk(z)为f(z)在点ak的Laurent展开式的主要部分,试证之.
其中z≠0,且z∈G及z≠ak(k=1,2,…,n),Gk(z)为f(z)在点ak的Laurent展开式的主要部分,试证之.
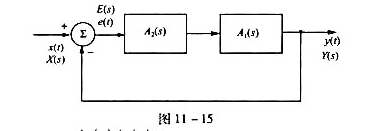
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时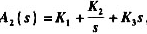 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
O(n)的算法:将L改造为I.=(a1,a3,…,an,…,a4,a2)。
将关系模式A分解为两个关系模式A1(C,T),A2(H,R,S),则其中A1的规范化程度达到______。
A.1NF
B.2NF
C.3NF
D.BCNF
一台三相异步电动机,转子绕组开路。在t=0时,定、转子绕组轴线+A1、+A2及气隙磁通密度矢量Bδ在空间的位置如图所示。
(邮票排列问题)设以a1,a2,…,ak诸正整数作项相加(一数可连用数次).又以Bn表总和为”的一切不同加法方式的种数.试确定Bn的发生函数
设a1,a2,…,an为一组不全相同之正数,则对于幂平均值Ms(a)=M.而言,于s>t>0时常有不等式

设向量组 线性相关,向量组
线性相关,向量组 线性无关,问:
线性无关,问:
(1)a1能否由a2,a3线性表示?证明你的结论。
(2)a4能否由a1,a2,a3线性表示?证明你的结论。