如果结果不匹配,请
如果结果不匹配,请 
 更多“直流电动机电刷的作用是改善换向性能的。()”相关的问题
更多“直流电动机电刷的作用是改善换向性能的。()”相关的问题
第1题
直流电机换向器表面的氧化膜是换向器与电刷间滑动接触产生电化学过程的结果,其主要作用是()。
A.减少换向器和电刷摩损
B.改善换向性能
C.便于维护
D.降低噪音
E.提高换向器表面硬度
第4题
励磁发电机空载电压过高。如果电刷在中性线上,一般是调节电阻Rt£L励磁发电机性能配合不好。可将励磁发电机的电刷()换向距离。
A.整理线路逆旋转方向移动2-4片
B.清扫线路逆旋转方向移动1-2片
C.局部更新顺旋转方向移动2-4片
D.顺旋转方向移动1-2片
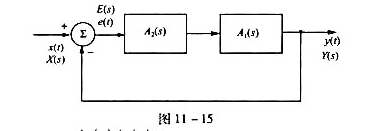
第10题
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
在图11-15所示的跟踪系统中A2(s)作为补偿器用来改善A3(s)的性能.其作用是保证系统稳
点击查看答案
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制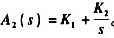 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若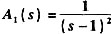 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时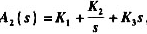 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.