如果结果不匹配,请
如果结果不匹配,请 
 更多“试画出UNIX巨型文件的索引结构图。”相关的问题
更多“试画出UNIX巨型文件的索引结构图。”相关的问题
第4题
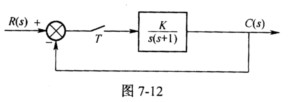
已知系统结构图如图7-12所示,T为采样周期,试画出参数K-T稳定域(取T做横坐标)曲线。
已知系统结构图如图7-12所示,T为采样周期,试画出参数K-T稳定域(取T做横坐标)曲线。
第5题
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数。 X1(s)=R(s)G1(s)[G1(s)-G7
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数C(s)/R(s)。
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
第6题
非线性系统的结构图如图8-39所示。 系统开始是静止的,输入信号r(t)=4×l(t),试写出开关线方
非线性系统的结构图如图8-39所示。
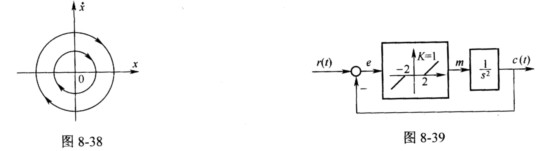 系统开始是静止的,输入信号r(t)=4×l(t),试写出开关线方程,确定奇点的位置和类型,画出该系统的相平面图,并分析系统的运动特点。
系统开始是静止的,输入信号r(t)=4×l(t),试写出开关线方程,确定奇点的位置和类型,画出该系统的相平面图,并分析系统的运动特点。
第7题
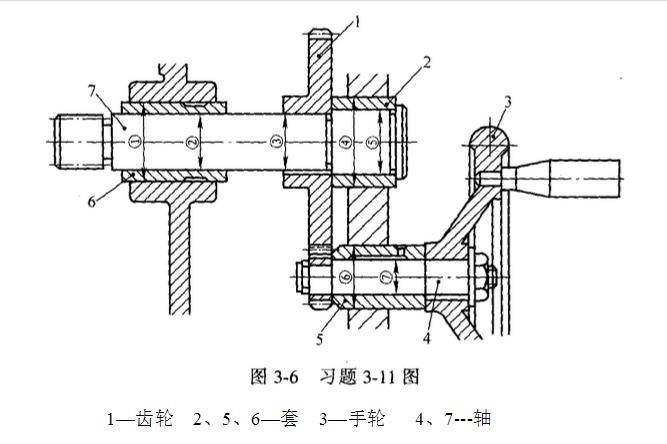
如图为车床溜板箱手动机构的部分结构图。转动手轮3通过键带动轴4及轴4上的小齿轮、再通过轴7右端的齿轮1、轴7
以及其左端的齿轮与床身齿条(未画出)啮合,使溜板箱沿导轨作纵向移动,各配合面的基本尺寸单位为mm试选择它们的基准制、公差等级及配合种类。