题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
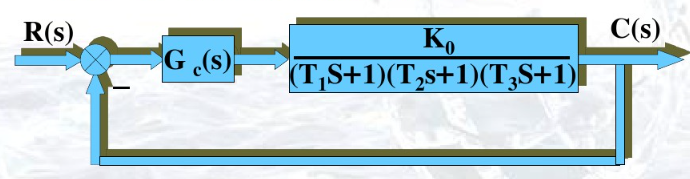
下图为由差动变压器T1和T2组成的无差平衡系统。波纹膜片传递系数kP;T1和T2的传递系数为kd1=kd2=kd;放大器的
下图为由差动变压器T1和T2组成的无差平衡系统。波纹膜片传递系数kP;T1和T2的传递系数为kd1=kd2=kd;放大器的放大倍数kA;力矩马达的传递系数kd;凸轮的传递系数为kf。分析其工作原理、画出传递系统组成的框图和求指针的偏转角a与被测压力px的关系式。

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“下图为由差动变压器T1和T2组成的无差平衡系统。波纹膜片传递…”相关的问题
更多“下图为由差动变压器T1和T2组成的无差平衡系统。波纹膜片传递…”相关的问题
 与IA的关系式.假设T1和T2的rcp均可忽略.
与IA的关系式.假设T1和T2的rcp均可忽略.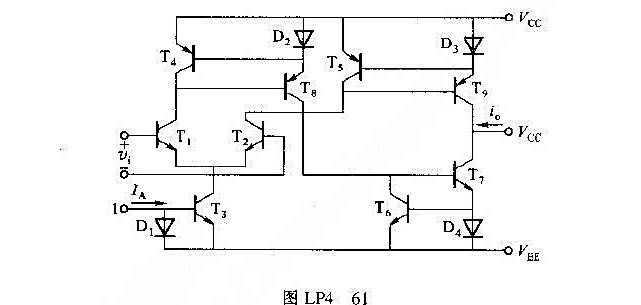
 ≥10。
≥10。