题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
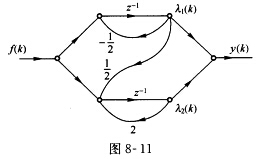
某连续时间LTI互联系统如图 (2)求整个系统的单位冲激响应h(t); (3)判断系统的下列性质,并说明
某连续时间LTI互联系统如图
 (2)求整个系统的单位冲激响应h(t); (3)判断系统的下列性质,并说明理由; a.记忆或无记忆; b.因果性; c.稳定性 (4)当系统输入f(t)=sin(2ωct)+cos(0.5ωct)时,求系统输出y(t)。
(2)求整个系统的单位冲激响应h(t); (3)判断系统的下列性质,并说明理由; a.记忆或无记忆; b.因果性; c.稳定性 (4)当系统输入f(t)=sin(2ωct)+cos(0.5ωct)时,求系统输出y(t)。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某连续时间LTI互联系统如图
(2)求整个系统的单位冲激响应h(t); (3)判断系统的下列性质,并说明理由; a.记忆或无记忆; b.因果性; c.稳定性 (4)当系统输入f(t)=sin(2ωct)+cos(0.5ωct)时,求系统输出y(t)。
如果结果不匹配,请 联系老师 获取答案
 更多“某连续时间LTI互联系统如图 (2)求整个系统的单位冲激响应…”相关的问题
更多“某连续时间LTI互联系统如图 (2)求整个系统的单位冲激响应…”相关的问题
某连续时间实的因果LTI系统的零、极点如图4-69所示,并己知.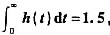 其中h(t)为该系统的单位冲激响应.试求:
其中h(t)为该系统的单位冲激响应.试求:
(1)它是什么类型的系统(全通或最小相移系统),并求h(t)(应为实函数);
(2)写出它的线性实系数微分方程表示;
(3)它的逆系统的单位冲激响应h1(t),该逆系统是可以实现的(即既因果又稳定)的吗?

已知当输入信号为 时,某连续时间因果LTI系统的输出信号为
时,某连续时间因果LTI系统的输出信号为 .试求:
.试求:
(1)该系统的单位冲激响应h(t),并画出h(t)的波形;
(2)当该系统输入为 时的输出信号y1(t),并画出y1(t)的波形.
时的输出信号y1(t),并画出y1(t)的波形.
某LTI系统的输入信号f(t)和零状态响应yzs(t)的波形分别如图(a)、(b)所示。
(1)求该系统的冲激响应h(t)。
(2)用积分器、加法器和延时器(T=1)构成该系统。
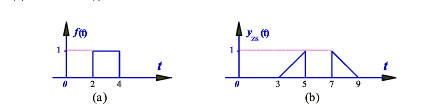
已知某因果LTI系统的系统函数H(s)的零极点图如图J7.6所示,且H(0)=一1.2,求: (1)系统函数H(s)及冲激响应h(t); (2)写出关联系统的输入输出的微分方程; (3)已知系统稳定,求H(jω),当激励为cos(3t)ε(t)时,求系统的稳态响应。
某系统相平面如图8-46所示,试求从P1点到P2点所需要的时间,其中x1分别取为1、2、3和4。

某稳定的连续时间LTI系统的频率响应为 试求其单位阶跃响应s(t).
试求其单位阶跃响应s(t).
已知某LTI系统的微分方程为
y"(t)+5y'(t)+6f(t)=2f'(t)+8f(t)
激励信号为f(t)=e-tu(t),初始状态为y(0-)=3,y'(0-)=2,求零输入响应、零状态响应和全响应。
状态y(-1)=-1,输入 时,其全响应y2(k)=(k-1)ε(k)。求输入
时,其全响应y2(k)=(k-1)ε(k)。求输入 时的零状态响应。
时的零状态响应。
某LTI系统的输入信号f(t)和其零状态响应yzs(t)的波形如题2.25图所示。
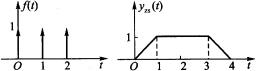 题2.25图 (1)求该系统的冲激响应h(t); (2)用积分器、加法器和延时器(t=1 s)构成该系统
题2.25图 (1)求该系统的冲激响应h(t); (2)用积分器、加法器和延时器(t=1 s)构成该系统