 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知控制系统的结构图如图3.63所示。 试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+
已知控制系统的结构图如图3.63所示。
 试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
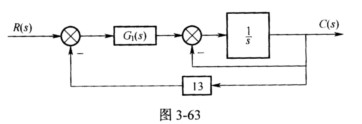 ,且r(t)=10.l(t)时,求tp、σp、ess。
,且r(t)=10.l(t)时,求tp、σp、ess。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知控制系统的结构图如图3.63所示。
试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
,且r(t)=10.l(t)时,求tp、σp、ess。
如果结果不匹配,请 联系老师 获取答案
 更多“已知控制系统的结构图如图3.63所示。 试求: (1)当主反…”相关的问题
更多“已知控制系统的结构图如图3.63所示。 试求: (1)当主反…”相关的问题
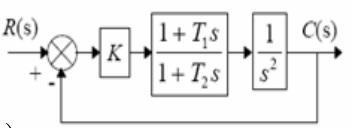
已知单位反馈系统结构图如图6-30所示,其中K为前向增益, 为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
为超前校正装置,T1>T2,试用频率法确定使系统具有最大相位裕度的增益K值。
系统结构图如图3-15所示,若系统以ωn=2rad/s的频率振荡,试确定系统的K和a值。
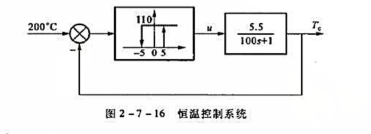
设恒温箱的结构图如图2-7-16所示。若要求温度保持200℃,温箱由常温20℃启动,试在 相平面上作出温度控制的相轨迹,并计算升温时间和保持温度的精度。
相平面上作出温度控制的相轨迹,并计算升温时间和保持温度的精度。
如图9-5所示系统由三个环节A,B,C组成,它们各有对不同输入r(t)的响应曲线y(t)分别如图9-6所示。
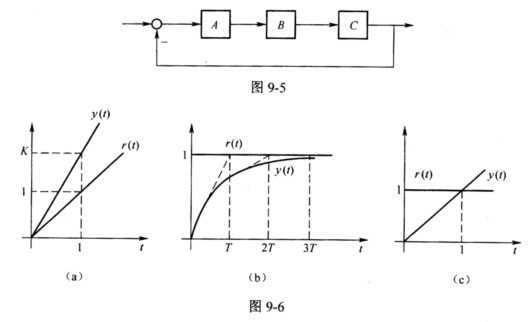 (1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。
(1)该系统的三个环节A,B,C的传递函数是什么?开环系统的总传递函数是什么?画出其结构图。 (2)从结构图上选状态变量,写出状态空间表达式。 (3)当K=10,T=0.1时,求单位阶跃输入时系统的稳态误差和动态响应指标百分比超调σ%,上升时间ts,峰值时间tp。
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。
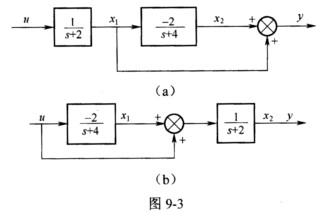 (1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
(1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
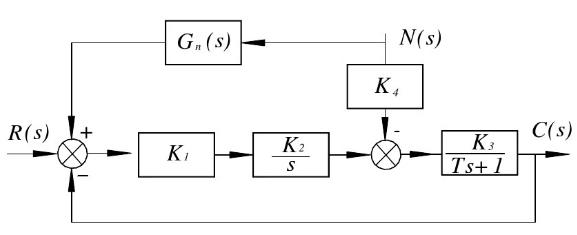
已知系统结构图如下图所示。
(1)求传递函数C(s)/R(s),C(s)/N(s)。
(2)若要消除干扰对输出的影响,即C(s)/N(s)=0,G0(s)=?







 (1)确定使闭环系统具有
(1)确定使闭环系统具有 及的k值和t值;(2)计算系统响应阶跃输入时的超调量
及的k值和t值;(2)计算系统响应阶跃输入时的超调量 和峰值时间
和峰值时间 ;(3)欲使系统完全不受
;(3)欲使系统完全不受 扰动的影响,请确定扰动补偿环节的传递函数
扰动的影响,请确定扰动补偿环节的传递函数 。
。
 :已知
:已知
 试选择参数a、b、c的值,使系统响应速度信号时无稳态误差。
试选择参数a、b、c的值,使系统响应速度信号时无稳态误差。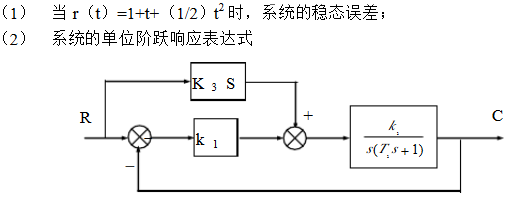
 ,
,










