 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
(1)为使是正实函数,确定a,b,c都应满足什么条件?(2)检验下列函数哪个是正实函数?
(1)为使 是正实函数,确定a,b,c都应满足什么条件?
是正实函数,确定a,b,c都应满足什么条件?
(2)检验下列函数哪个是正实函数?

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
(1)为使是正实函数,确定a,b,c都应满足什么条件?
(2)检验下列函数哪个是正实函数?
如果结果不匹配,请 联系老师 获取答案
 更多“(1)为使是正实函数,确定a,b,c都应满足什么条件?(2)…”相关的问题
更多“(1)为使是正实函数,确定a,b,c都应满足什么条件?(2)…”相关的问题
h1(t)波形如图所示,确定一个连续信号x1(t),使它具有如下性质:

(1)x1(t)是实函数;
(2)当t<0时,x1(t)=0;
(3)对所有t≥0,|x1(t)|≤1;
(4)y1(t)=x1(t)*h1(t)在t=4的值尽可能大。
设f(x)为定义于-1<x<1的实值函数,且f'(0)存在,又{an},{bn}是两个数列,满足

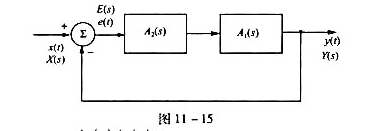
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
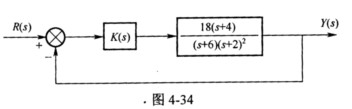
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
 。
。
 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
设F1(x)与F2(x)分别为随机变量,X1与X2的分布函数,为使F(x)=aF1(x)-bF2(x)是某一随机变量的分布函数,在下列给定的各组数值中应取().
A.a=3/5,b=-2/5
B.a=2/3,b=2/3
C.a=-1/2,b=3/2
D.a=1/2,b=-3/2
A.任意正奇数
B.任意负偶数
C.任意正偶数
D.任意负奇数


















