题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
处理计算机工控问题的一般思路对具体生产过程列出微分方程,利用拉氏变换得到代数方程,然后利用微分算子S与位移算子Z的关系求出此过程的Z变换,最后利用Z逆变换求出其解。()
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“处理计算机工控问题的一般思路对具体生产过程列出微分方程,利用…”相关的问题
更多“处理计算机工控问题的一般思路对具体生产过程列出微分方程,利用…”相关的问题
A.是一种微分变换,将积分函数特化为几何形式,将微分方程特化为函数方程
B.是一种积分变换,将微分积分函数特化为代数函数形式,将微分方程特化为代数方程
C.是一种代数变换,将积分函数特化为几何形式,将微分方程特化为微分方程
D.是一种恒等变换,将微分函数特化为几何形式,将积分方程特化为函数方程

(1)对上式取拉氏变换,求回波系统的系统函数H(s);
(2)令 设计一个逆系统,先求它的系统函数Hi(s);
设计一个逆系统,先求它的系统函数Hi(s);
(3)再取H1(s)的逆变换得到此逆系统的冲激响应hi(t),它应当与教材第二章2.9节的结果一致.
A.甲加工了20个零件,乙加工了25个零件,乙比甲多加工了多少个零件
B.本月甲门店的销售额为20万元,乙门店的销售额为25万元,求两个门店的销售总额
C.哥哥买了5本书,弟弟买了3本书,两人总共买了多少本书
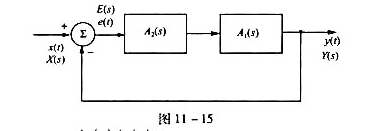
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.