 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
奇骏的CTA系统,车辆在何种状态时可以实时检测后方两侧来车?()
A.车辆静止
B.挂倒车档静止
C.8km/h以下倒车
D.8km/h以上倒车
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.车辆静止
B.挂倒车档静止
C.8km/h以下倒车
D.8km/h以上倒车
如果结果不匹配,请 联系老师 获取答案
 更多“奇骏的CTA系统,车辆在何种状态时可以实时检测后方两侧来车?…”相关的问题
更多“奇骏的CTA系统,车辆在何种状态时可以实时检测后方两侧来车?…”相关的问题
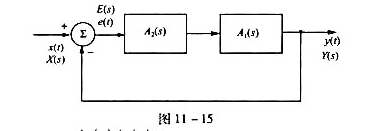
定,并使误差信号e(t)=x(t)-y(t)随时间增长而衰减到零.
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制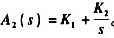 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若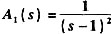 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时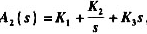 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
A.车辆处于READY状态
B.发动机不工作
C.车辆加速时,车速在大于或等于5千米/小时,且小于30千米/小时范围内
D.减速时,车速在大于25千米/小时,或小于等于1千米范围内
A、 2g/3l
2g/3l
B、2mgl 2g/3l
C、 g/3l
g/3l
D、 2g/3l
2g/3l

















